În analiză numerică,interpolarea polinomială este o tehnică de interpolare a unui set de date sau a unei funcții printr-un polinom. Cu alte cuvinte, dat un set de puncte (obținut, de exemplu, ca urmare a unui experiment), vom căuta un polinom care trece prin toate aceste puncte, și, eventual, verificați pentru alte condiții, dacă este posibil, gradul cel mai mic.
Definiție
Având un set de n +1 puncte, (xi,yi) (xi diferite între ele), găsim un polinom P (cu coeficienți reali) de grad cel mult n, care satisface:
Se demonstrează că există un singur polinom de grad cel mult n care trece prin cele n puncte.
Construcția polinomului de interpolare
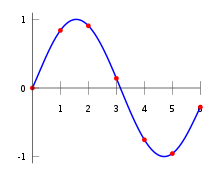
Punctele roșii corespund punctelor (xk,yk), iar curba albastră reprezintă polinomului de interpolare.Punctele roșii indică punctele de date (xk,yk), în timp ce curba albastră arată polinomul de interpolare.
Să presupunem că polinomul de interpolare este dat de:
unde p trebuie să verifice:
astfel încât să treacă prin setul de puncte de interpolat. Afirmația că p interpolează punctele de date înseamnă că
Trebuie să rezolvăm acest sistem pentru pentru a construi interpolant Matricea este o matrice Vandermonde.
Determinantul său este diferit de zero, ceea ce demonstrează că polinomul de interpolare există și este unic.
Rangul matricii Vandermonde poate fi mare [1], ceea ce cauzează erori mari la calculul coeficienților în cazul în care sistemul de ecuații este rezolvat cu ajutorul metodei de eliminare Gauss.
Unicitatea polinomului de interpolare
Având în vedere matricea Vandermonde folosit de mai sus pentru a construi interpolant, putem scrie sistemul sub forma
Pentru a dovedi că V este matrice inversabilă, vom folosi formula determinantului Vandermonde:
Deoarece cele n + 1 puncte sunt distincte, determinantul nu poate fi zero, deoarece nu este niciodată la zero, prin urmare V este nesingulară și sistemul are o soluție unică.
Eroarea de interpolare
Dacă este de ori derivabilă pe intervalul , iar este un polinom de grad cel mult n care interpolează f în n + 1 puncte distincte {xi} (i=0,1,...,n) în acel interval, atunci
cu în I.
Această formulă este demonstrată prin aplicarea iterativă a teoremei lui Rolle pe subintervalele .
Pentru fiecare x în intervalul de definiție există în acel interval astfel încât
Să notăm termenul de eroare cu și considerăm o funcție auxiliară unde și Deoarece sunt rădăcinile funcției , vom avea și Atunci are n +2 rădăcini. Din teorema lui Rolle, are n +1 rădăcini, apoi are o rădăcină , unde este în intervalul I. Astfel încât să putem obține
Deoarece este un polinom de grad cel mult n, atunci Astfel
Deoarece este rădăcina lui , atunci
Prin urmare: .
În cazul nodurilor de interpolare la distanțe egale , rezultă că eroarea de interpolare este O.
În cazul particular (puncte distribuite uniform), apare de obicei o eroare foarte mare de interpolare, cunoscută sub numele de fenomenul Runge, atunci când crește numărul de puncte pentru un interval dat.
Note
^Gautschi, Walter (). „Norm Estimates for Inverses of Vandermonde Matrices”. Numerische Mathematik. 23 (4): 337–347. doi:10.1007/BF01438260.
Bibliografie
Constantin Ilioi, Probleme de optimizare și algoritmi de aproximare a soluțiilor, Editura Academiei Republicii Socialiste România, București, 1980.
www.utgjiu.ro/math/mbuneci/book/mn2009.pdf/ Metode numerice - Aspecte teoretice și practice, Mădălina Roxana Buneci, Editura Academică Brâncuși, Târgu Jiu, 2009
http://cs.upm.ro/~bela.finta/.files/carti/Numerika.pdf Arhivat în , la Wayback Machine.
www.vpetrehus.home.ro/Lectii_AN.pdf/ Lecții de analiză numerică, Viorel Petrehus, Universitatea Tehnică de Construcții București, 2010
Legături externe
Portal Matematică
www.utgjiu.ro/math/mbuneci/book/mn2009.pdf
http://cs.upm.ro/~bela.finta/.files/carti/Numerika.pdf Arhivat în , la Wayback Machine.














![{\displaystyle I=[\min(x_{0},...x_{n},x),\max(x_{0},...x_{n},x)]\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7e3fc36144cf43b0f41e15fd7824fe6f06961308)



![{\displaystyle [x_{i-1},x_{i}]\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e99a811472f14f82f502af0b12b07062c6b49057)



















![{\displaystyle [x_{0},x_{n}]\,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/46f2c48635573a68acf20993a1ce8d846a6cb239)












